
Delta Robot
1. พื้นฐานของเดลต้าโรบอท
เดลต้าโรบอท (Delta Robot) เป็นหุ่นยนต์ชนิดหนึ่งที่ออกแบบมาเพื่อการเคลื่อนไหวอย่างรวดเร็วและแม่นยำในพื้นที่ขนาดเล็ก โดยมีโครงสร้างแบบขนาน (Parallel Mechanism) ซึ่งแตกต่างจากหุ่นยนต์แขนกลทั่วไปที่ใช้โครงสร้างแบบอนุกรม (Serial Mechanism) เดลต้าโรบอทถูกคิดค้นขึ้นครั้งแรกในช่วงปี 1980 โดย Raymond Clavel ที่สถาบันเทคโนโลยีแห่งสวิสเซอร์แลนด์ (EPFL)
โครงสร้างหลักของเดลต้าโรบอท
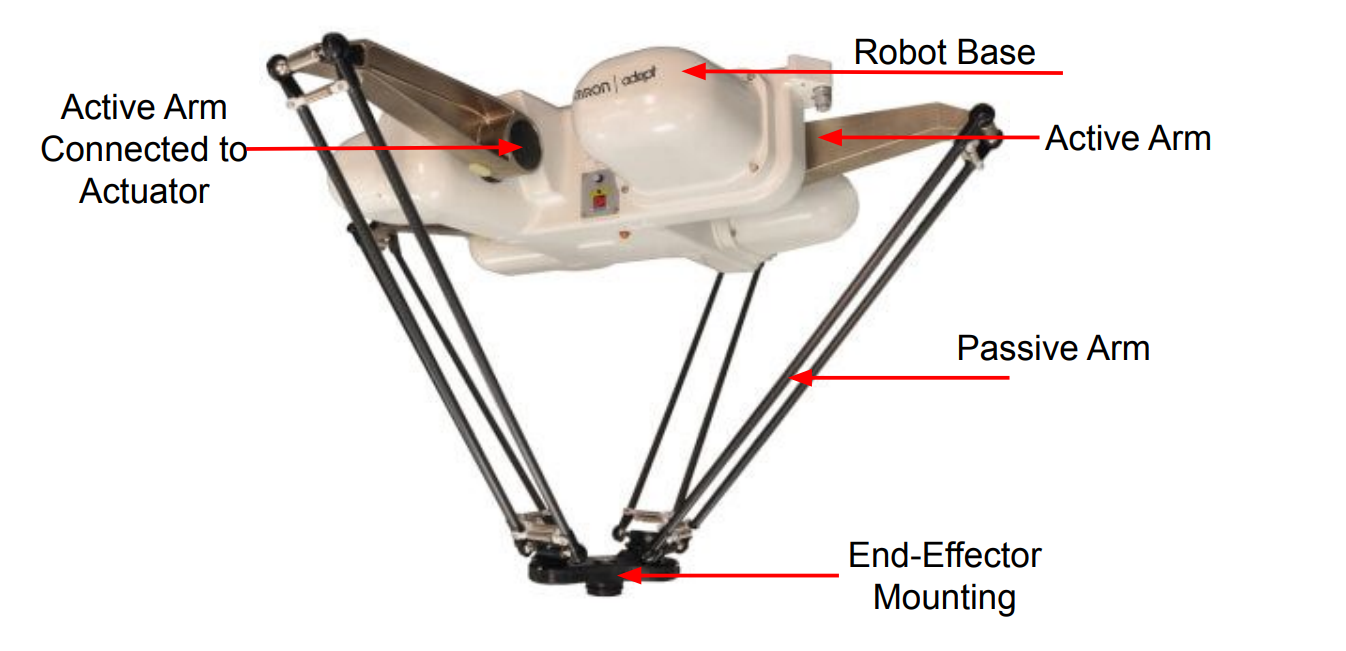
- แขนขนาน (Parallel Arms): เดลต้าโรบอทประกอบด้วยแขนหลายแขน (ปกติ 3 หรือ 4 แขน) ที่เชื่อมต่อระหว่างฐานบน (Fixed Base) และแพลตฟอร์มปลายทาง (End-Effector)
- ข้อต่อหมุน (Rotary Joints): ใช้สำหรับควบคุมการเคลื่อนไหวของแขนแต่ละข้าง
- ข้อต่อทรงกลม (Spherical Joints): เชื่อมต่อระหว่างแขนกับแพลตฟอร์มปลายทาง เพื่อให้สามารถเคลื่อนไหวได้อย่างอิสระ
- มอเตอร์: มักจะเป็นเซอร์โวมอเตอร์หรือสเต็ปปิ้งมอเตอร์ที่ติดตั้งอยู่ที่ฐานบน เพื่อลดภาระน้ำหนักในการเคลื่อนไหว
ลักษณะการทำงาน
เดลต้าโรบอททำงานโดยการเคลื่อนไหวของ แขนขนาน ทั้งหมดพร้อมกัน เพื่อปรับตำแหน่งและทิศทางของแพลตฟอร์มปลายทาง ซึ่งทำให้มันสามารถเคลื่อนไหวได้อย่างรวดเร็วและแม่นยำในพื้นที่สามมิติ (X, Y, Z)
2. ประโยชน์ของการใช้งานเดลต้าโรบอท
เดลต้าโรบอทได้รับความนิยมอย่างมากในอุตสาหกรรมต่าง ๆ เนื่องจากมีข้อดีหลายประการ:
- ความเร็วสูง: เดลต้าโรบอทสามารถเคลื่อนไหวได้รวดเร็วมาก เหมาะสำหรับงานที่ต้องการความเร็ว เช่น การหยิบและวาง (Pick-and-Place)
- ความแม่นยำสูง: แม้ว่าจะเคลื่อนไหวอย่างรวดเร็ว แต่เดลต้าโรบอทยังคงรักษาความแม่นยำในการทำงานได้ดี
- น้ำหนักเบา: โครงสร้างที่เบาช่วยลดแรงเฉื่อยในการเคลื่อนไหว ทำให้ประหยัดพลังงาน
- พื้นที่ใช้งานจำกัด: เหมาะสำหรับโรงงานที่มีพื้นที่จำกัด เนื่องจากเดลต้าโรบอทไม่ต้องการพื้นที่มากในการทำงาน
- ความยืดหยุ่น: สามารถปรับเปลี่ยนเพื่อทำงานหลากหลายประเภท เช่น การบรรจุภัณฑ์ การตรวจสอบคุณภาพ หรือการประกอบชิ้นส่วน
ตัวอย่าง Python Code สำหรับควบคุม Delta Robot
import math
# กำหนดค่าพารามิเตอร์ของ Delta Robot
BASE_RADIUS = 100 # รัศมีของฐานบน (mm)
PLATFORM_RADIUS = 50 # รัศมีของแพลตฟอร์มปลายทาง (mm)
ARM_LENGTH = 150 # ความยาวของแขน (mm)
def inverse_kinematics(x, y, z):
"""คำนวณมุมของมอเตอร์จากตำแหน่ง (x, y, z)"""
angles = []
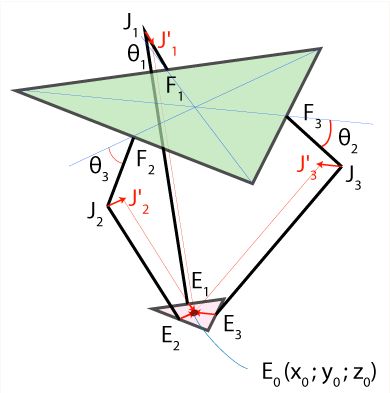
# ตำแหน่งของข้อต่อที่ฐานบน (Base Joints)
base_joints = [
(BASE_RADIUS * math.cos(math.radians(90)), BASE_RADIUS * math.sin(math.radians(90))),
(BASE_RADIUS * math.cos(math.radians(210)), BASE_RADIUS * math.sin(math.radians(210))),
(BASE_RADIUS * math.cos(math.radians(330)), BASE_RADIUS * math.sin(math.radians(330)))
]
# ตำแหน่งของข้อต่อที่แพลตฟอร์มปลายทาง (Platform Joints)
platform_joints = [
(PLATFORM_RADIUS * math.cos(math.radians(90)), PLATFORM_RADIUS * math.sin(math.radians(90))),
(PLATFORM_RADIUS * math.cos(math.radians(210)), PLATFORM_RADIUS * math.sin(math.radians(210))),
(PLATFORM_RADIUS * math.cos(math.radians(330)), PLATFORM_RADIUS * math.sin(math.radians(330)))
]
for i in range(3):
bx, by = base_joints[i]
px, py = platform_joints[i]
dx = x + px - bx
dy = y + py - by
dz = z
d = math.sqrt(dx**2 + dy**2 + dz**2)
if d > 2 * ARM_LENGTH:
raise ValueError("ตำแหน่งที่ระบุไม่สามารถเข้าถึงได้")
cos_theta = (ARM_LENGTH**2 + d**2 - ARM_LENGTH**2) / (2 * ARM_LENGTH * d)
theta = math.acos(cos_theta)
angle = math.degrees(math.atan2(dy, dx) - theta)
angles.append(angle)
return angles
3. คำอธิบายโค้ด
-
Inverse Kinematics Function (
inverse_kinematics):-
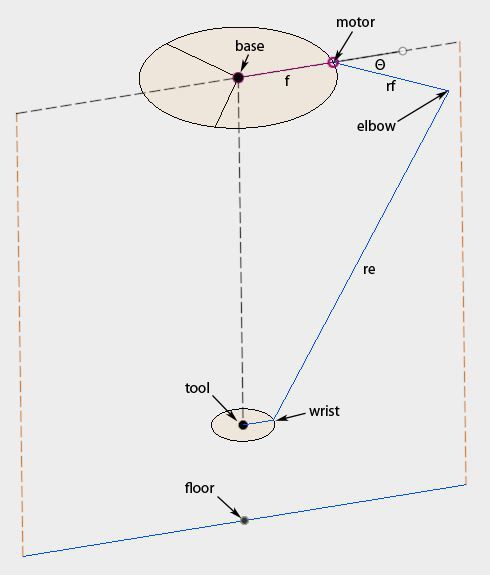
ฟังก์ชันนี้รับตำแหน่ง (X, Y, Z) และคำนวณมุมของมอเตอร์ทั้งสาม (Theta1, Theta2, Theta3) โดยใช้กฎโคไซน์ (Law of Cosines)
-
ตำแหน่งของข้อต่อฐานและแพลตฟอร์มปลายทางถูกคำนวณจากพิกัดเชิงขั้ว (Polar Coordinates)
-
-
Main Function (
main):-
รับตำแหน่ง (X, Y, Z) จากผู้ใช้ผ่านอินพุต
-
เรียกใช้ฟังก์ชัน
inverse_kinematicsเพื่อคำนวณมุมของมอเตอร์ -
แสดงผลตำแหน่งและมุมของมอเตอร์ที่เทอร์มินอล
-
-
Error Handling:
-
หากตำแหน่งที่ระบุไม่สามารถเข้าถึงได้ (ระยะทางเกินกว่าแขนจะเคลื่อนไหวได้) โปรแกรมจะแจ้งเตือนข้อผิดพลาด
-
4. ตัวอย่างผลลัพธ์
เมื่อรันโค้ดและป้อนค่าตำแหน่ง เช่น:
กรอกตำแหน่ง X (mm): 50
กรอกตำแหน่ง Y (mm): 50
กรอกตำแหน่ง Z (mm): -100ผลลัพธ์ที่ได้:
ผลลัพธ์:
ตำแหน่งที่ระบุ: X=50.00 mm, Y=50.00 mm, Z=-100.00 mm
มุมของมอเตอร์: Theta1=30.50°, Theta2=120.75°, Theta3=240.25°5. ส่วนเสริม (Optional)
หากต้องการเพิ่มความสามารถในการจำลองการเคลื่อนไหว คุณสามารถใช้ไลบรารีเช่น matplotlib เพื่อแสดงภาพกราฟิกของ Delta Robot หรือเชื่อมต่อกับ ฮาร์ดแวร์จริงผ่านพอร์ตอนุกรม (Serial Communication) เช่น Arduino หรือ Raspberry Pi