
Delta Robot
1. พื้นฐานของเดลต้าโรบอท
เดลต้าโรบอท (Delta Robot) เป็นหุ่นยนต์ชนิดหนึ่งที่ออกแบบมาเพื่อการเคลื่อนไหวอย่างรวดเร็วและแม่นยำในพื้นที่ขนาดเล็ก โดยมีโครงสร้างแบบขนาน (Parallel Mechanism) ซึ่งแตกต่างจากหุ่นยนต์แขนกลทั่วไปที่ใช้โครงสร้างแบบอนุกรม (Serial Mechanism) เดลต้าโรบอทถูกคิดค้นขึ้นครั้งแรกในช่วงปี 1980 โดย Raymond Clavel ที่สถาบันเทคโนโลยีแห่งสวิสเซอร์แลนด์ (EPFL)
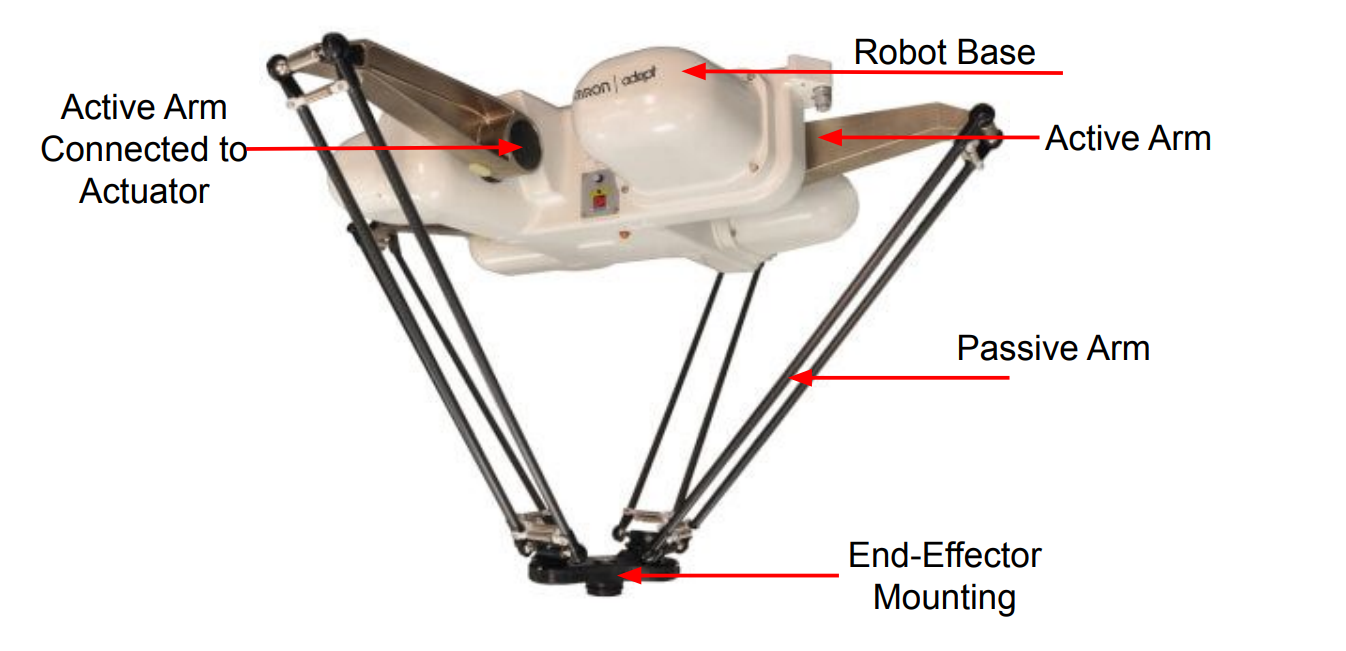
โครงสร้างหลักของเดลต้าโรบอท
- แขนขนาน (Parallel Arms): เดลต้าโรบอทประกอบด้วยแขนหลายแขน (ปกติ 3 หรือ 4 แขน) ที่เชื่อมต่อระหว่างฐานบน (Fixed Base) และแพลตฟอร์มปลายทาง (End-Effector)
- ข้อต่อหมุน (Rotary Joints): ใช้สำหรับควบคุมการเคลื่อนไหวของแขนแต่ละข้าง
- ข้อต่อทรงกลม (Spherical Joints): เชื่อมต่อระหว่างแขนกับแพลตฟอร์มปลายทาง เพื่อให้สามารถเคลื่อนไหวได้อย่างอิสระ
- มอเตอร์: มักจะเป็นเซอร์โวมอเตอร์หรือสเต็ปปิ้งมอเตอร์ที่ติดตั้งอยู่ที่ฐานบน เพื่อลดภาระน้ำหนักในการเคลื่อนไหว
ลักษณะการทำงาน
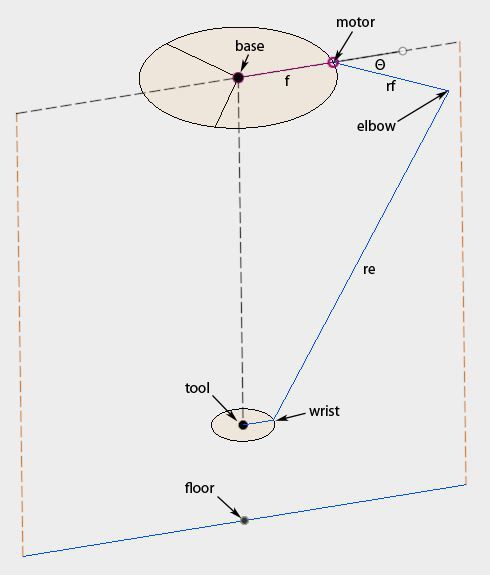
เดลต้าโรบอททำงานโดยการเคลื่อนไหวของ แขนขนาน ทั้งหมดพร้อมกัน เพื่อปรับตำแหน่งและทิศทางของแพลตฟอร์มปลายทาง ซึ่งทำให้มันสามารถเคลื่อนไหวได้อย่างรวดเร็วและแม่นยำในพื้นที่สามมิติ (X, Y, Z)
2. ประโยชน์ของการใช้งานเดลต้าโรบอท
เดลต้าโรบอทได้รับความนิยมอย่างมากในอุตสาหกรรมต่าง ๆ เนื่องจากมีข้อดีหลายประการ:
- ความเร็วสูง: เดลต้าโรบอทสามารถเคลื่อนไหวได้รวดเร็วมาก เหมาะสำหรับงานที่ต้องการความเร็ว เช่น การหยิบและวาง (Pick-and-Place)
- ความแม่นยำสูง: แม้ว่าจะเคลื่อนไหวอย่างรวดเร็ว แต่เดลต้าโรบอทยังคงรักษาความแม่นยำในการทำงานได้ดี
- น้ำหนักเบา: โครงสร้างที่เบาช่วยลดแรงเฉื่อยในการเคลื่อนไหว ทำให้ประหยัดพลังงาน
- พื้นที่ใช้งานจำกัด: เหมาะสำหรับโรงงานที่มีพื้นที่จำกัด เนื่องจากเดลต้าโรบอทไม่ต้องการพื้นที่มากในการทำงาน
- ความยืดหยุ่น: สามารถปรับเปลี่ยนเพื่อทำงานหลากหลายประเภท เช่น การบรรจุภัณฑ์ การตรวจสอบคุณภาพ หรือการประกอบชิ้นส่วน
ตัวอย่าง Python Code สำหรับควบคุม Delta Robot
import math
# กำหนดค่าพารามิเตอร์ของ Delta Robot
BASE_RADIUS = 100 # รัศมีของฐานบน (mm)
PLATFORM_RADIUS = 50 # รัศมีของแพลตฟอร์มปลายทาง (mm)
ARM_LENGTH = 150 # ความยาวของแขน (mm)
def inverse_kinematics(x, y, z):
"""คำนวณมุมของมอเตอร์จากตำแหน่ง (x, y, z)"""
angles = []
# ตำแหน่งของข้อต่อที่ฐานบน (Base Joints)
base_joints = [
(BASE_RADIUS * math.cos(math.radians(90)), BASE_RADIUS * math.sin(math.radians(90))),
(BASE_RADIUS * math.cos(math.radians(210)), BASE_RADIUS * math.sin(math.radians(210))),
(BASE_RADIUS * math.cos(math.radians(330)), BASE_RADIUS * math.sin(math.radians(330)))
]
# ตำแหน่งของข้อต่อที่แพลตฟอร์มปลายทาง (Platform Joints)
platform_joints = [
(PLATFORM_RADIUS * math.cos(math.radians(90)), PLATFORM_RADIUS * math.sin(math.radians(90))),
(PLATFORM_RADIUS * math.cos(math.radians(210)), PLATFORM_RADIUS * math.sin(math.radians(210))),
(PLATFORM_RADIUS * math.cos(math.radians(330)), PLATFORM_RADIUS * math.sin(math.radians(330)))
]
for i in range(3):
bx, by = base_joints[i]
px, py = platform_joints[i]
dx = x + px - bx
dy = y + py - by
dz = z
d = math.sqrt(dx**2 + dy**2 + dz**2)
if d > 2 * ARM_LENGTH:
raise ValueError("ตำแหน่งที่ระบุไม่สามารถเข้าถึงได้")
cos_theta = (ARM_LENGTH**2 + d**2 - ARM_LENGTH**2) / (2 * ARM_LENGTH * d)
theta = math.acos(cos_theta)
angle = math.degrees(math.atan2(dy, dx) - theta)
angles.append(angle)
return angles
3. คำอธิบายโค้ด
-
Inverse Kinematics Function (
inverse_kinematics):-
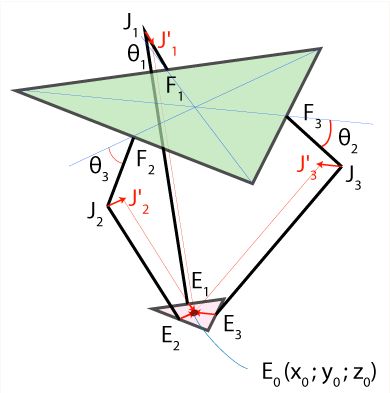
ฟังก์ชันนี้รับตำแหน่ง (X, Y, Z) และคำนวณมุมของมอเตอร์ทั้งสาม (Theta1, Theta2, Theta3) โดยใช้กฎโคไซน์ (Law of Cosines)
-
ตำแหน่งของข้อต่อฐานและแพลตฟอร์มปลายทางถูกคำนวณจากพิกัดเชิงขั้ว (Polar Coordinates)
-
-
Main Function (
main):-
รับตำแหน่ง (X, Y, Z) จากผู้ใช้ผ่านอินพุต
-
เรียกใช้ฟังก์ชัน
inverse_kinematicsเพื่อคำนวณมุมของมอเตอร์ -
แสดงผลตำแหน่งและมุมของมอเตอร์ที่เทอร์มินอล
-
-
Error Handling:
-
หากตำแหน่งที่ระบุไม่สามารถเข้าถึงได้ (ระยะทางเกินกว่าแขนจะเคลื่อนไหวได้) โปรแกรมจะแจ้งเตือนข้อผิดพลาด
-
4. ตัวอย่างผลลัพธ์
เมื่อรันโค้ดและป้อนค่าตำแหน่ง เช่น:
กรอกตำแหน่ง X (mm): 50
กรอกตำแหน่ง Y (mm): 50
กรอกตำแหน่ง Z (mm): -100ผลลัพธ์ที่ได้:
ผลลัพธ์:
ตำแหน่งที่ระบุ: X=50.00 mm, Y=50.00 mm, Z=-100.00 mm
มุมของมอเตอร์: Theta1=30.50°, Theta2=120.75°, Theta3=240.25°5. ส่วนเสริม (Optional)
หากต้องการเพิ่มความสามารถในการจำลองการเคลื่อนไหว คุณสามารถใช้ไลบรารีเช่น matplotlib เพื่อแสดงภาพกราฟิกของ Delta Robot หรือเชื่อมต่อกับ ฮาร์ดแวร์จริงผ่านพอร์ตอนุกรม (Serial Communication) เช่น Arduino หรือ Raspberry Pi
การใช้งาน และ ควบคุมหุ่นยนต์ UR5 ด้วย Python : การสร้าง Eco System ที่ครบวงจร

บทนำ
บทความนี้หวังว่าจะเป็นแรงบันดาลใจและแนวทางให้กับผู้ที่สนใจพัฒนาระบบอัตโนมัติและการควบคุมหุ่นยนต์โดยใช้ Python ในการสร้าง Eco System ที่ครอบคลุมทุกด้าน ตั้งแต่การควบคุมหุ่นยนต์ ไปจนถึงการประมวลผลข้อมูล และ การสื่อสารในระบบอัจฉริยะ

ในยุคที่เทคโนโลยีอัตโนมัติ และ หุ่นยนต์เข้ามามีบทบาทในทุกภาคส่วนของอุตสาหกรรมและงานวิจัย หุ่นยนต์ UR5 จาก Universal Robots ได้กลายเป็นหนึ่งในหุ่นยนต์แบบ collaborative robot (cobot) ที่ได้รับความนิยมอย่างแพร่หลาย ด้วยความยืดหยุ่นในการทำงาน ความง่ายในการโปรแกรม และความสามารถในการปรับตัวให้เข้ากับสภาพแวดล้อมที่หลากหลาย
บทความนี้จะนำเสนอภาพรวมของการใช้งานและควบคุมหุ่นยนต์ UR5 ด้วยภาษา Python โดยเน้นที่การพัฒนาระบบที่สามารถนำไป ต่อยอดเป็น Eco System ที่ครบวงจรสำหรับงานอุตสาหกรรมและงานวิจัยต่าง ๆ
Link : UR5 Robot
1. ภาพรวมของหุ่นยนต์ UR5
คุณสมบัติเด่น
- น้ำหนักเบาและขนาดกะทัดรัด: UR5 มีความสามารถในการทำงานร่วมกับมนุษย์ได้อย่างปลอดภัย เนื่องจากมีขนาดที่เล็กและน้ำหนักเบา
- ความยืดหยุ่นในการทำงาน: ด้วยการออกแบบที่ปรับเปลี่ยนได้ง่าย ทำให้ UR5 สามารถใช้งานในงานที่หลากหลาย เช่น งานประกอบชิ้นส่วน งานบรรจุภัณฑ์ หรือแม้กระทั่งงานในห้องปฏิบัติการ
- ความแม่นยำและความเร็ว: หุ่นยนต์รุ่นนี้สามารถทำงานที่ต้องการความแม่นยำสูงได้ในเวลาอันรวดเร็ว

บทบาท ในระบบ Eco System
หุ่นยนต์ UR5 สามารถเชื่อมต่อและสื่อสารกับส่วนประกอบอื่น ๆ ของระบบอัตโนมัติได้อย่างง่ายดาย เช่น ระบบเซนเซอร์ ระบบการตรวจสอบคุณภาพสินค้า หรือระบบฐานข้อมูล ซึ่งทั้งหมดนี้จะถูกประสานงานผ่านโปรโตคอลมาตรฐานและการพัฒนาด้วย Python
2. การควบคุมและการใช้งานด้วย Python
การเชื่อมต่อและสื่อสาร
ด้วยการใช้ Python ซึ่งเป็นภาษาที่มีความยืดหยุ่นและมี library ที่หลากหลาย ผู้ใช้งานสามารถเชื่อมต่อกับหุ่นยนต์ UR5 ผ่าน API หรือโปรโตคอลที่ Universal Robots รองรับ ไม่ว่าจะเป็นการส่งคำสั่งเคลื่อนที่ (G-code หรือคำสั่งที่กำหนดเอง) หรือการรับข้อมูลสถานะของหุ่นยนต์ในเวลาจริง
การพัฒนาระบบ Inverse Kinematics
หนึ่งในความท้าทายหลักของการควบคุมหุ่นยนต์คือการคำนวณ Inverse Kinematics (IK) ซึ่งเป็นการแปลงตำแหน่งในเชิงพื้นที่ให้เป็นมุมของข้อต่อ
ตัวอย่างการใช้งานไลบรารี ikpy ด้วย Python ช่วยให้การคำนวณ IK สำหรับหุ่นยนต์ UR5 เป็นไปอย่างมีประสิทธิภาพ ซึ่งสามารถประยุกต์ใช้กับการทำงานในสถานการณ์จริง เช่น การวางตำแหน่งอุปกรณ์หรือการจับสิ่งของบนสายการผลิต
การพัฒนาระบบควบคุมที่ตอบสนองแบบเรียลไทม์
Python ยังสามารถนำไปประยุกต์ใช้งานร่วมกับระบบ real-time data processing ได้ โดยการรับข้อมูลจากเซนเซอร์ต่าง ๆ และส่งคำสั่งปรับเปลี่ยนตำแหน่งของหุ่นยนต์ให้สอดคล้องกับสถานการณ์ปัจจุบัน เช่น
- การตรวจจับวัตถุและการวางแผนเส้นทางการเคลื่อนที่
- การปรับเปลี่ยนตำแหน่งของหุ่นยนต์ให้เข้ากับสถานะของสายการผลิต
- การสื่อสารและการประสานงานกับส่วนประกอบอื่น ๆ ของระบบผ่าน IoT
3. ประโยชน์และการประยุกต์ใช้งานใน Eco System
ประโยชน์ที่ได้รับ
- ความยืดหยุ่น: ด้วยการใช้งาน Python ผู้ใช้งานสามารถปรับแต่งและพัฒนาฟังก์ชันเพิ่มเติมได้ตามต้องการ ไม่ว่าจะเป็นการคำนวณ IK การวิเคราะห์ข้อมูล หรือการสื่อสารกับระบบอื่น ๆ
- ความสามารถในการขยายระบบ: Eco System ที่สร้างขึ้นสามารถรองรับการเพิ่มโมดูลหรือฟีเจอร์ใหม่ ๆ ได้อย่างง่ายดาย เช่น การรวมระบบ Machine Learning เพื่อปรับปรุงกระบวนการผลิต
- ลดความซับซ้อน: การควบคุมหุ่นยนต์ด้วย Python ช่วยให้กระบวนการเขียนโปรแกรมเป็นไปอย่างรวดเร็วและเข้าใจง่าย ลดเวลาในการพัฒนาและบำรุงรักษา
ตัวอย่างการประยุกต์ใช้งาน
-
สายการผลิตอัจฉริยะ:
นำหุ่นยนต์ UR5 ไปใช้ในสายการผลิตที่ต้องการความแม่นยำสูงและการทำงานร่วมกับเซนเซอร์วัดคุณภาพสินค้า โดย Python สามารถประสานงานกับระบบฐานข้อมูลและระบบตรวจสอบคุณภาพสินค้าแบบเรียลไทม์ -
งานประกอบชิ้นส่วน:
ในอุตสาหกรรมยานยนต์หรืออุตสาหกรรมอิเล็กทรอนิกส์ หุ่นยนต์ UR5 สามารถใช้งานร่วมกับระบบ vision system ที่พัฒนาด้วย Python ในการตรวจจับและจัดตำแหน่งชิ้นส่วนเพื่อการประกอบที่แม่นยำ -
หุ่นยนต์ให้บริการและงานวิจัย:
สำหรับงานวิจัยหรือหุ่นยนต์ให้บริการในห้องปฏิบัติการ Python ช่วยให้สามารถพัฒนาโปรโตคอลการสื่อสารและควบคุมที่ตอบสนองต่อสิ่งแวดล้อมได้อย่างรวดเร็ว ทำให้สามารถทดสอบแนวคิดใหม่ ๆ และปรับเปลี่ยนตามความต้องการของงานวิจัยได้
4. การสร้าง Eco System ด้วย Python
การวางสถาปัตยกรรมระบบ
การสร้าง Eco System ที่สมบูรณ์นั้นควรรวมการควบคุมหุ่นยนต์ UR5 การจัดการข้อมูลจากเซนเซอร์ และการสื่อสารกับฐานข้อมูลหรือระบบคลาวด์ โดยใช้ Python เป็นศูนย์กลางในการพัฒนา:
- Module ควบคุมหุ่นยนต์: ใช้ Python ในการส่งคำสั่งควบคุมหุ่นยนต์ UR5 ผ่าน API หรือไลบรารีเฉพาะ เช่น ikpy
- Module ประมวลผลข้อมูล: รวมถึงการวิเคราะห์ข้อมูลจากเซนเซอร์ การประมวลผลภาพ (computer vision) หรือแม้กระทั่งการใช้ Machine Learning
- Module สื่อสารและจัดเก็บข้อมูล: ใช้ Python ในการเชื่อมต่อกับฐานข้อมูลหรือระบบคลาวด์ เพื่อเก็บข้อมูลการทำงานและวิเคราะห์ผลลัพธ์ในระยะยาว
การบูรณาการเข้ากับระบบ IoT
ด้วยความสามารถของ Python ในการเชื่อมต่อกับอุปกรณ์ IoT ทำให้สามารถพัฒนาระบบที่คอยตรวจสอบและควบคุมหุ่นยนต์ UR5 ได้แบบเรียลไทม์ เช่น การส่งข้อมูลสภาพแวดล้อมให้กับหุ่นยนต์เพื่อให้สามารถปรับตำแหน่งและการทำงานให้เหมาะสมกับสถานการณ์
ตัวอย่าง Forward kinematic And Invert Kinematic โดย การประมวลผล ด้วยภาษา python
import numpy as np
from ikpy.chain import Chain
from ikpy.utils import plot
# ฟังก์ชันสำหรับอ่านและแยกวิเคราะห์ G-code
def parse_gcode(file_path):
positions = []
with open(file_path, 'r') as file:
for line in file:
line = line.strip()
if line.startswith('G1'): # เลือกเฉพาะคำสั่งเคลื่อนที่
parts = line.split()
x, y, z = None, None, None
for part in parts:
if part.startswith('X'):
x = float(part[1:])
elif part.startswith('Y'):
y = float(part[1:])
elif part.startswith('Z'):
z = float(part[1:])
if x is not None and y is not None and z is not None:
positions.append((x / 1000, y / 1000, z / 1000)) # แปลงเป็นเมตร
return positions
# ฟังก์ชัน Inverse Kinematics (IK) สำหรับ UR5
def calculate_inverse_kinematics(urdf_file, x, y, z):
# โหลด URDF ของ UR5
ur5_chain = Chain.from_urdf_file(urdf_file)
# กำหนดตำแหน่งปลายแขน (TCP)
target_position = [x, y, z]
# คำนวณ Inverse Kinematics
joint_angles = ur5_chain.inverse_kinematics(target_position)
return joint_angles
# ฟังก์ชันหลัก
def main():
gcode_file = "ur5.nc" # ไฟล์ G-code
urdf_file = "ur5.urdf" # ไฟล์ URDF ของ UR5 (ดาวน์โหลดจาก Universal Robots GitHub)
positions = parse_gcode(gcode_file)
print("Starting Inverse Kinematics Calculation...")
for i, (x, y, z) in enumerate(positions):
joint_angles = calculate_inverse_kinematics(urdf_file, x, y, z)
joint_angles_deg = [np.degrees(angle) for angle in joint_angles] # แปลงเป็นองศา
print(f"Position {i + 1}: X={x:.3f}, Y={y:.3f}, Z={z:.3f}")
print(f"Joint Angles: {joint_angles_deg}")
print("-" * 40)
if __name__ == "__main__":
main()
สรุป
การใช้งานและควบคุมหุ่นยนต์ UR5 ด้วย Python เป็นแนวทางที่มีความยืดหยุ่นและเหมาะสำหรับการสร้าง Eco System ที่ครบวงจรในยุคดิจิทัล
- การควบคุมที่ง่ายและแม่นยำ: ด้วยการใช้ไลบรารีอย่าง ikpy ผู้ใช้งานสามารถคำนวณ Inverse Kinematics และควบคุมหุ่นยนต์ได้อย่างมีประสิทธิภาพ
- การบูรณาการที่หลากหลาย: Python ช่วยให้สามารถเชื่อมต่อหุ่นยนต์เข้ากับระบบ IoT, ระบบวิเคราะห์ข้อมูล และฐานข้อมูลต่าง ๆ ได้อย่างง่ายดาย
- การประยุกต์ใช้งานที่หลากหลาย: ไม่ว่าจะเป็นสายการผลิต งานประกอบชิ้นส่วน หรือการวิจัยหุ่นยนต์ การใช้ Python ในการพัฒนาระบบควบคุมสามารถนำไปสู่การปรับปรุงประสิทธิภาพและเพิ่มความสามารถในการทำงานร่วมกับส่วนอื่น ๆ ของระบบได้อย่างต่อเนื่อง
ด้วยแนวทางนี้ ผู้พัฒนาสามารถต่อยอดระบบและสร้างนวัตกรรมใหม่ ๆ ที่ตอบสนองความต้องการของอุตสาหกรรมและสังคมในยุคที่เทคโนโลยีก้าวหน้าอย่างรวดเร็วได้อย่างเต็มที่
- You are here:
-
Home

- Robotics